Use APKPure App
Get RTAB-Map old version APK for Android

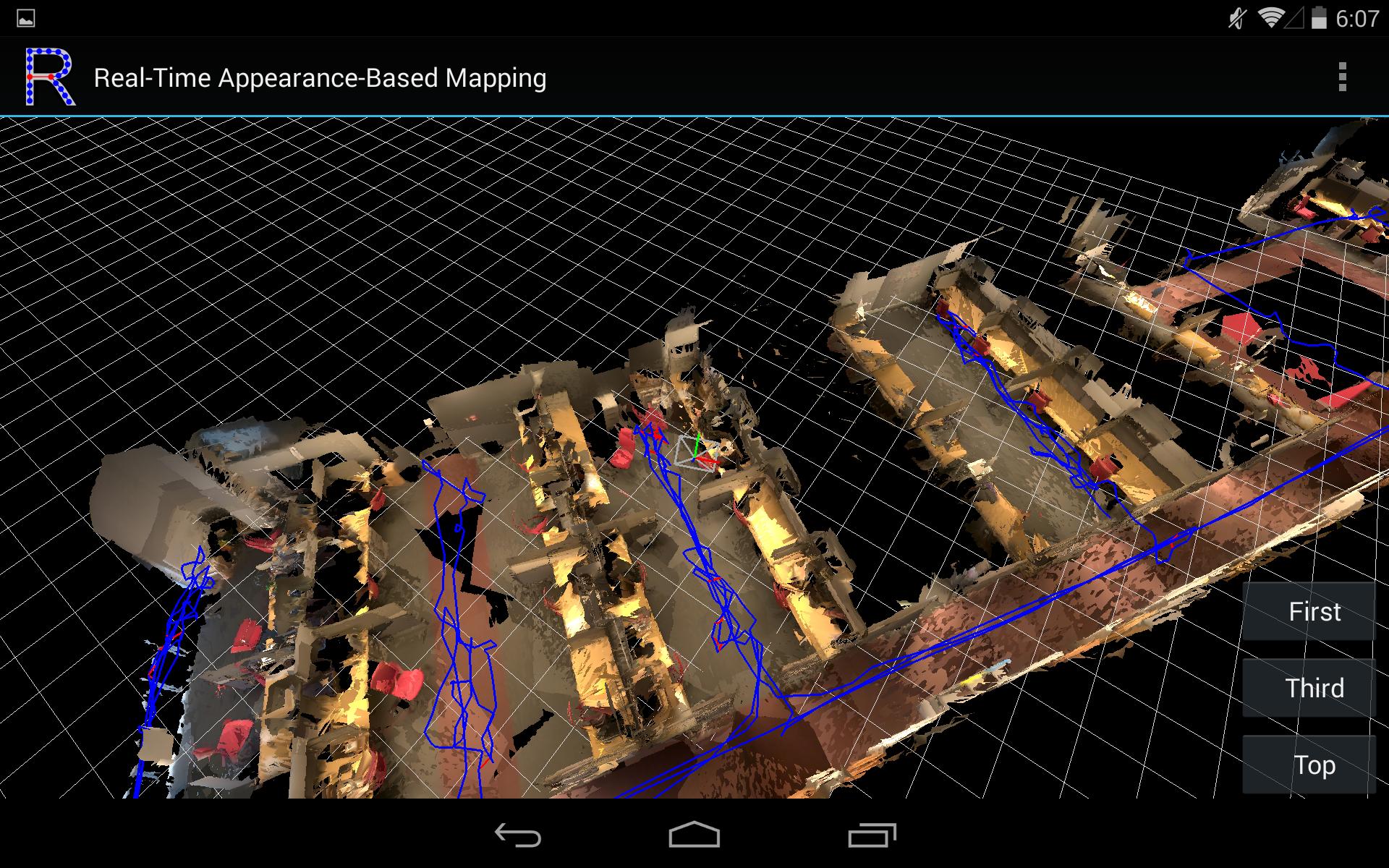

Real-Time Appearance-Based Mapping
RTAB-Map (Real-Time Appearance-Based Mapping) is an Open Source RGB-D Graph-Based SLAM approach based on an incremental appearance-based loop closure detector. The loop closure detector uses a bag-of-words approach to determinate how likely a new image comes from a previous location or a new location. When a loop closure hypothesis is accepted, a new constraint is added to the map's graph, then a graph optimizer minimizes the errors in the map. A memory management approach is used to limit the number of locations used for loop closure detection and graph optimization, so that real-time constraints on large-scale environnements are always respected.
Model of the featured video on Sketchfab here: https://skfb.ly/6nryX
For questions, ask on the forum or on Github: http://introlab.github.io/rtabmap/#troubleshooting
*** It works only on Project Tango
Features:
* Online 3D scanning/mapping of the environment
* Online loop closure detection and map correction
* Save in DB format (RTAB-Map desktop format)
* Export in PLY or OBJ (with textures up to 720p)
* Multi-session mapping (save and continue later)
* Localization-only mode (in a previous session)
* Trajectory mode where point clouds are not saved (similar to Area Learning)
* Post-processing options (e.g., use Bundle Adjustment to align textures)
* Added "Settings->Mapping->Save GPS" option (default disabled) to save GPS coordinates in the database. See issue #226 on project's page for more info.
Last updated on Nov 24, 2016
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option
تازہ ترین ورژن
![]() 0.11.11
0.11.11
اپ لوڈ کردہ
Melissa Smith
Android درکار ہے
Android 4.2+
کٹیگری
رپورٹ کریں
Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
Oct 24, 2018