APKPure Appを使用する
RTAB-Mapの旧いバージョンをダウンロードすることが可能

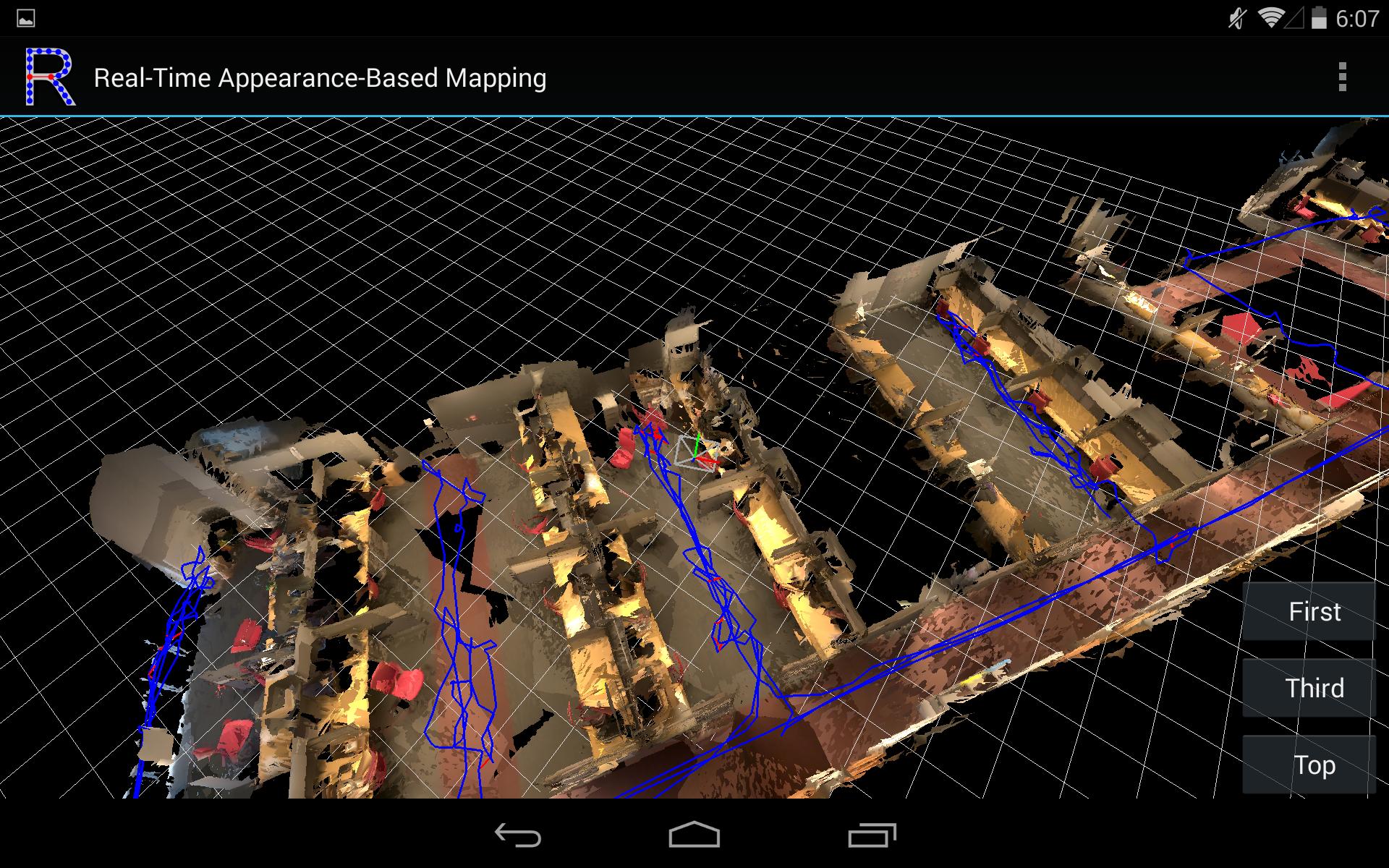

リアルタイム外観ベースのマッピング
RTAB-地図(リアルタイム外観ベースのマッピング)は、増分外観ベースのループ閉鎖検出器に基づくオープンソースのRGB-DグラフベースSLAMのアプローチです。ループ閉鎖検出器は、新たなイメージが前の場所または新しい場所から来てどのように可能性が確定するために袋の-言葉のアプローチを使用しています。ループ閉鎖仮説が受け入れられると、新しい制約は、マップのグラフに追加され、その後、グラフオプティマイザは、マップ内のエラーを最小限に抑えることができます。メモリ管理アプローチは、大規模environnementsにリアルタイム制約が常に尊重されるように、ループ閉鎖検出とグラフ最適化のために使用される場所の数を制限するために使用されます。
ここSketchfabのおすすめ動画のモデル:https://skfb.ly/6nryX
質問については、GitHubのフォーラム上または上尋ねる:http://introlab.github.io/rtabmap/#troubleshooting
***これは、プロジェクトタンゴでのみ動作します
特徴:
*環境のオンライン3Dスキャン/マッピング
*オンラインループ閉鎖検出と訂正マップ
* DB形式で保存します(RTAB-地図のデスクトップ形式)
(720Pまでのテクスチャで)PLYまたはOBJでエクスポート*
*マルチセッションマッピング(保存し、後で継続)
(以前のセッションで)*ローカライズ専用モード
(地域学習に類似)の点群が保存されません*軌道モード
*後処理オプション(例えば、テクスチャを整列させるためにバンドル調整を使用して)
*を追加しました「設定 - > Mapping->保存GPS」オプションは、GPSをデータベースに保存するように座標(デフォルトは無効)。詳細は、プロジェクトのページに問題#226を参照してください。
Last updated on 2016年11月24日
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option
Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
2018年10月24日